


















































主要功能
导航控制
集成导航控制算法,支持市激光导航、二维码导航方式。

二维码导航

激光导航
底盘控制
集成运动控制算法,支持两驱差速、四驱差速底盘模型。

四驱差速

两驱差速
应用功能拓展
支持各类型场景应用功能,料腿识别、随动功能、标志物二次定位、导航激光辅助避障、3D视觉避障等。

料架随动

顶升随动
执行机构控制
支持顶升机构、辊筒机构、料箱机构等执行机构控制。

辊筒机构

顶升机构
安全功能控制
支持移动机器人安全功能控制,支持接入安全激光、超声雷达、视觉避障摄像头、安全触边等。

安全触变

视觉避障摄像头

超声雷达

安全激光
交互功能控制
支持各类交互功能控制,手操器接入、车载屏接入;灯光开关、声音系统控制等。

声音系统控制

灯光开关

车载屏接入

手操器接入
推荐适用类型

潜伏顶升式

协作式

辊筒式

料箱式
基本参数
型号 | MRC3100-L101 |
描述 | 差速轮专用控制器 |
尺寸 W x H x D(mm) | 150 x 100 x 40 |
防护等级 | IP65 |
温度 | -25℃~+70℃ |
湿度 | 10%~90%RH 无凝露 |
EMC | 工业三级 |
IMU | √ |
CAN(通道) | 3 |
RS485/RS232/RS422(通道) | 3/×/2 |
复用通信口(通道) | 1(可配CAN/RS485/RS232) |
AI/AO | × |
DI/DO/DIO | 14/8/4 |
编码器(通道) | 2 |
音频接口 | 1 |
有线工业以太网 | 3 |
无线调试接口 | √ |
激光导航 | √ |
二维码导航 | √ |
其他导航方式 | × |
差速底盘运动模型 | 两驱差速、四驱差速 |
其他底盘运动模型 | × |
导航定位精度 | ±5mm |
角度控制精度 | ±0.5° |
地图面积 | ≤400000㎡ |
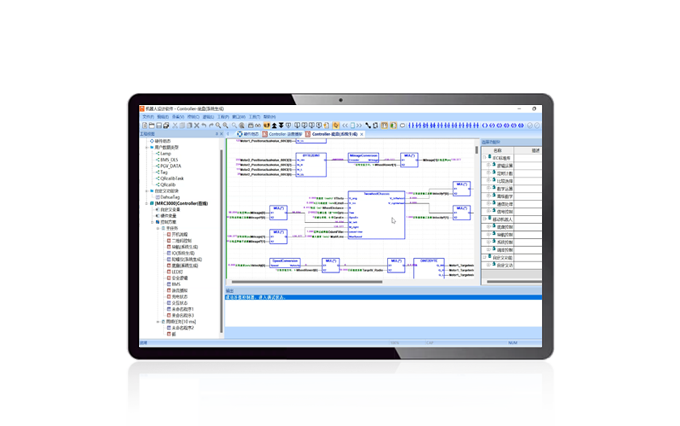
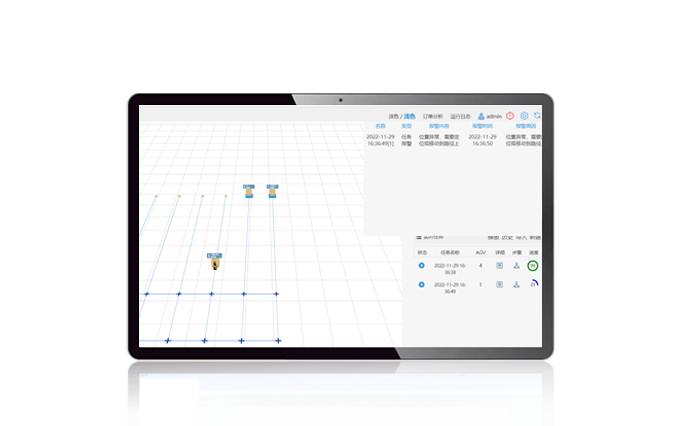
机器人设计软件 | √ |
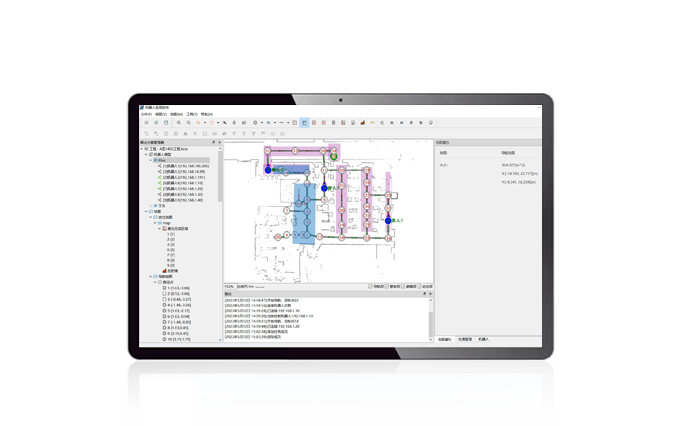
机器人应用软件 | √ |
机器人监控及调度软件 | 选配 |
扩展功能 | 料腿识别、随动功能、标志物二次定位、导航激光辅助避障、3D视觉避障 |
相关解决方案

潜伏顶升搬运式
潜伏顶升式移动机器人通过顶升方式搬运托盘、货架等载具,将运输的物料、货架举升并快速平稳运送至指定位置,完成仓储厂房车间的货架调配、分拣、整合等工作,自动对接移栽机构、升降机构、立库等设备,达到无人化。
潜伏顶升搬运式整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
查看详情
潜伏顶升搬运式整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。

协作(复合)式
协作(复合)式移动机器人在无人搬运底盘基础上增加机械臂,形成协作AGV,可完成物料在移动机器人与设备机台间的上下料工作,也可通过机械臂上的视觉传感器对物料进行全方位检测。
协作(复合)式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
查看详情
协作(复合)式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。

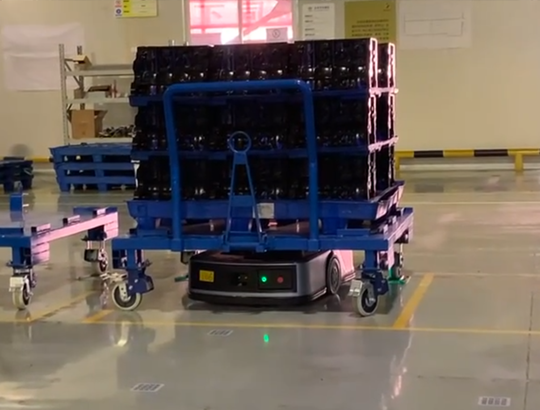
辊筒式
辊筒式移动机器人是在无人搬运底盘基础上增加辊筒机构,形成产线对接机器人,可以实现车间与仓库、产线与产线、生产设备与生产设备之间的无缝连接。
辊筒式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
查看详情
辊筒式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。

料箱式
多层料箱机器人是一款智能化物流搬运设备,可实现多个料箱的智能拣选、存取、搬运。无需借助任何轨道,可前进、后退、转弯,具有自主导航、主动避障和自动充电等功能。
料箱式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
查看详情
料箱式移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。

© 2023 浙江科聪控制技术有限公司官网 | 让移动机器人服务人类 浙公网安备 33052302000842号 浙ICP备19001570号-1 sitemap.xml
技术支持:宗阖网络